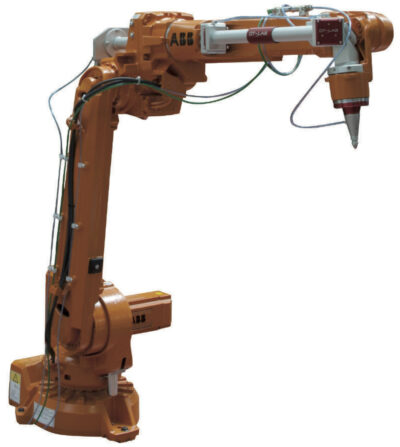
Il sistema di guida del fascio laser consente al fascio laser di raggiungere il polso del robot mantenendo il corretto allineamento durante qualsiasi movimento del robot stesso.
È formato da due componenti:
- Il braccio articolato
- Il percorso ottico a bordo del secondo braccio del robot
Il braccio articolato dirige il fascio laser, emesso dalla sorgente laser, fino al gomito del robot. Esso è formato da due tubi di 1500 mm di lunghezza e da snodi sui quali sono alloggiati specchi di rinvio. Questa struttura consente, grazie ai suoi 7 gradi libertà, di seguire tutti i movimenti del robot mantenendo sempre allineato il fascio laser; la precisione dell’allineamento è di 1± mm a 4 metri corrispondente ad un angolo di 0.25 mrad (circa 1 primo). Il collegamento del braccio articolato sul gomito del robot non limita il robot nel raggiungere i punti di lavoro.
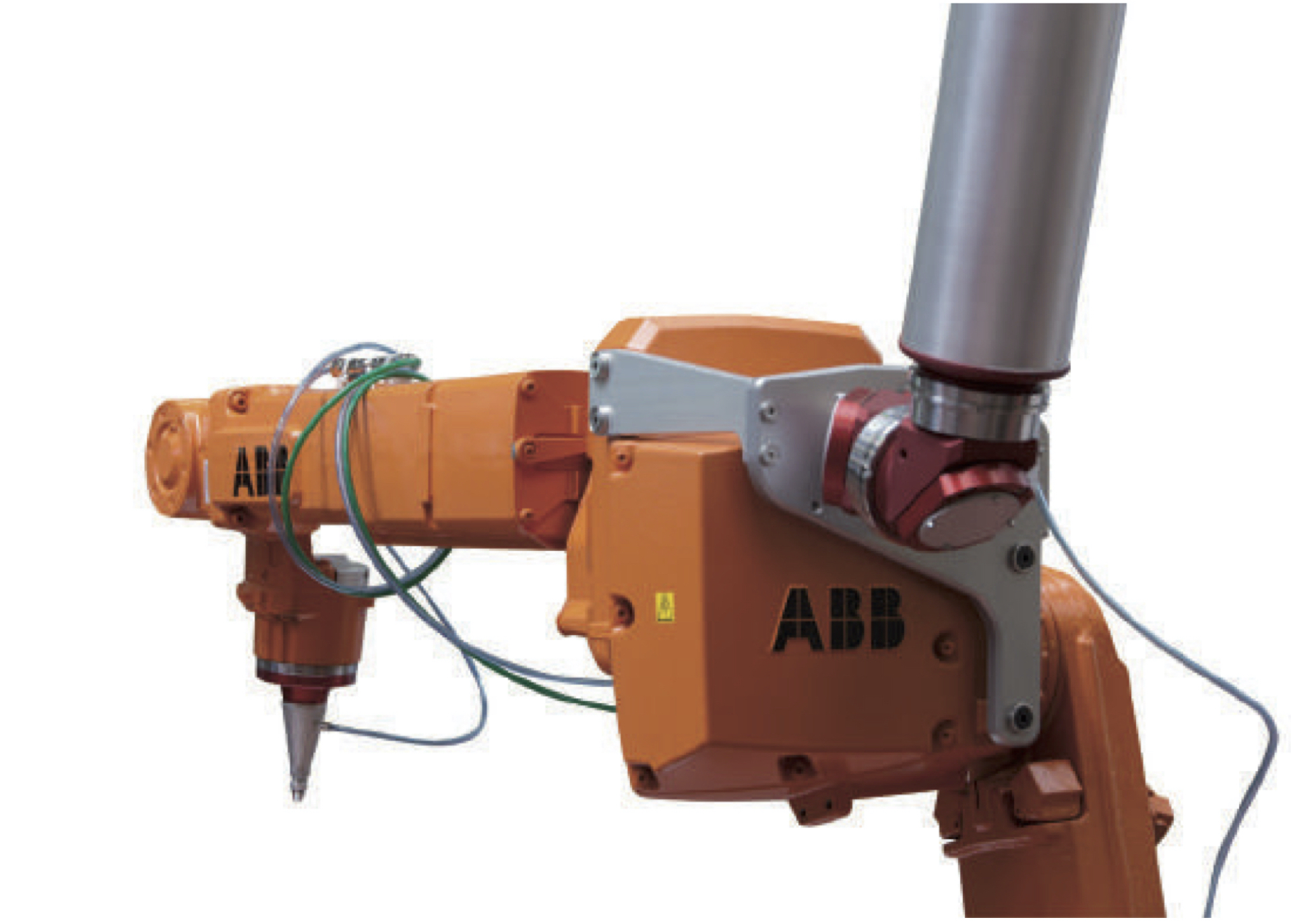
Il percorso ottico fissato sul secondo braccio del robot è costituito da quattro rinvii, su ognuno dei quali è alloggiato uno specchio, collegati da tubi. Esso riceve il fascio laser dal gomito del robot e lo dirige sul polso consentendone il movimento e mantenendolo sempre sull’asse di quest’ultimo.
Sul polso del robot possono essere montati:
• Testa di focalizzazione con lenti da 5” o da 7.5” di focale
• Testa di scansione 1735 con campo operativo da 180 mm a 500×500 mm
Optional:
Sensore di distanza per mantenere la corretta focalizzazione.